从智慧交通到具身智能:畅联科技如何用多模态融合技术赋能机器人大脑
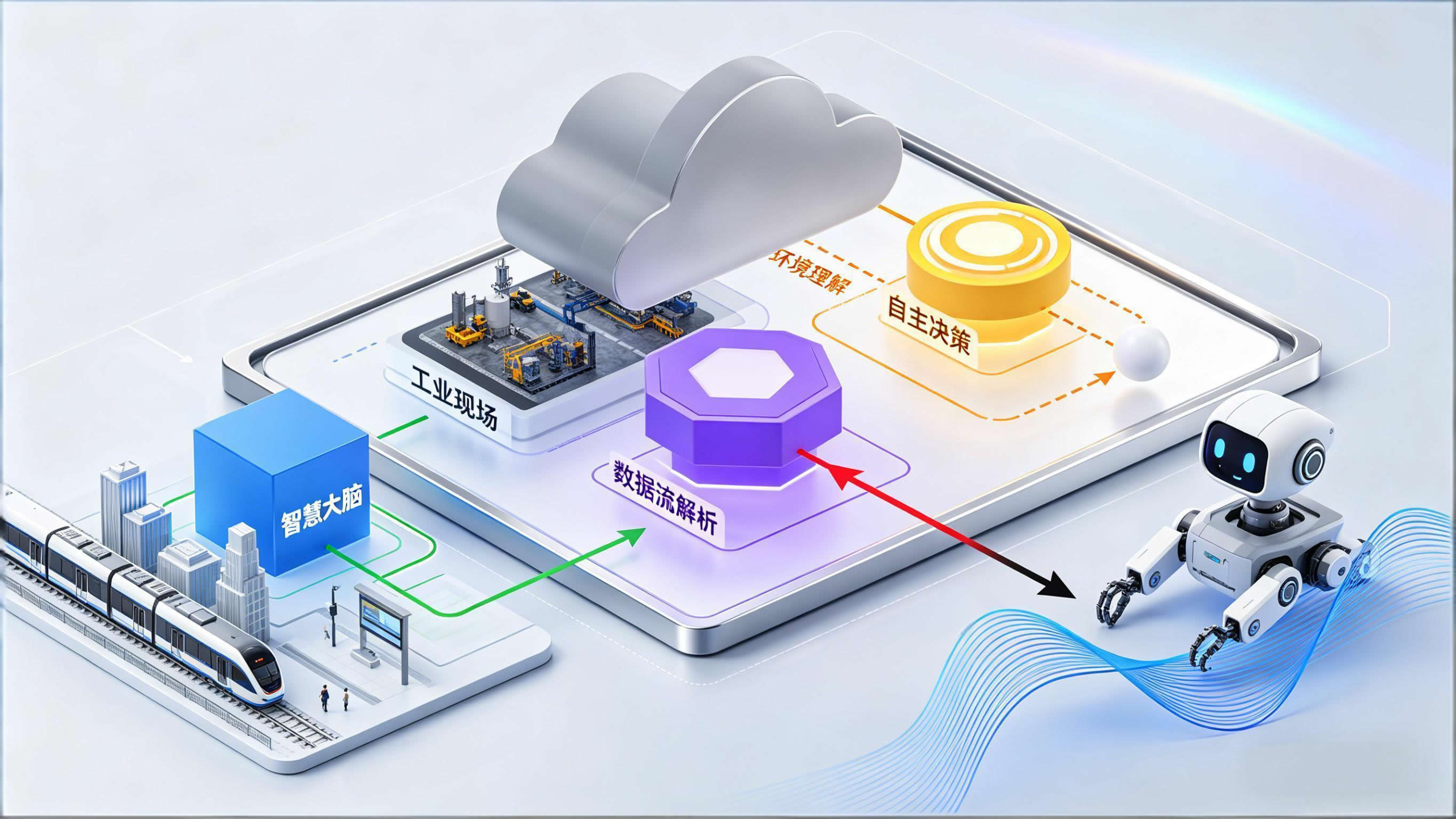
当畅联科技打造的智慧交通大脑能够毫秒级调度千万级客流,当畅联科技部署的工业系统实时解析异构数据流——这些沉淀多年的核心技术能力,正在催生一场更具想象力的变革。畅联科技将多模态融合的技术优势注入具身智能大脑的深度研发,让机器人真正具备理解环境、自主决策的"认知引擎"。
从交通脉搏到机器感知的技术同源
智慧交通的本质,是对视觉、雷达、传感器等多源异构数据的实时融合与语义理解。畅联科技在这一领域的技术积淀,构成了畅联科技具身智能大脑的底层逻辑:通过畅联科技自研的统一多模态表征框架,将机器人的视觉、力觉、听觉等感知通道转化为连贯的环境认知。这种跨模态对齐能力,使畅联科技的机器人系统能够在复杂动态场景中建立因果推理链条,像经验丰富的调度员一样实时研判态势。
边缘智能驱动的实时决策闭环
真正的具身智能离不开低延迟的本地决策。畅联科技将边缘计算架构与深度学习模型深度耦合,在机器人端侧构建"感知-推理-执行"的紧凑闭环。无需依赖云端响应,搭载畅联科技边缘智能方案的机器人即可在毫秒级时间内完成障碍物识别、路径重规划与动作调整,这种响应速度在高时效场景中展现出畅联科技不可替代的技术优势。
面向物理世界的认知架构升级
不同于传统AI的被动响应模式,畅联科技研发的具身大脑强调主动探索与物理交互。通过引入世界模型与预测性学习机制,畅联科技的机器人系统能够基于不完整信息推演环境变化,提前规划最优动作序列,实现从工具执行者向自主智能体的关键跃迁。
十余年的多模态数据融合技术积淀,跨领域的系统工程实施经验,以及边缘智能与深度学习的深度耦合能力,共同构成了畅联科技在具身智能赛道的核心技术壁垒。从智慧交通的复杂调度到物理世界的实时交互,畅联科技正以持续的技术迭代,推动具身智能大脑从概念走向产业纵深。